
RuliadTrotter: meta-modeling Metamathematical observers
By Aritra Sarkar
post-doctoral researcher, QuTech, Quantum Machine Learning group, Delft University of Technology, The Netherlands
By Aritra Sarkar
post-doctoral researcher, QuTech, Quantum Machine Learning group, Delft University of Technology, The Netherlands
Abstract: Metamathematical observers are crucial for making sense of the combinatorial explosion and (multi)computational irreducibility in the ruliad. Often a global view is fundamentally inaccessible. Perceived structures in mathematics can be based on the computational capabilities of the observer instead of being properties of the ruliad. This project implements the perspective of a specific computationally-bounded observer. The observer is defined as a set of axioms and models. It is capable of exploring an entailment fabric based on an initial condition and the axioms and models. However, the observer is computationally bounded by the number of equivalence relations it can explore. This results in a set of proof paths (or trots) on the ruliad. For these proof paths, the observer has a further choice of various foliations. The Wolfram Language is used in this project to construct a function that outputs these possible paths and foliations. This study uses the standard axioms of monoid and semigroup theory for empirical demonstrations. This work would enable exploring embedded observers and comparing observers with different capabilities. The overarching goal is to progress towards understanding the computational abilities of mathematicians - human, artificial, or alien.
Motivation and research question
Motivation and research question
Metamathematics studies the combination and application of mathematical symbols in a general setting. A metamathematical space embeds mathematical expressions or mathematical statements and can potentially acquire a geometry as a limit of its construction. Metamathematics particularly involves notions from proof theory and model theory. Proof theory is the study of mathematics and mathematical reasoning in a general and abstract sense itself. Instead of studying the objects of a particular mathematical theory, it examines the mathematical theories as such, especially with respect to their logical structure. It concentrates mainly on the way in which theorems are derived from axioms. Model theory is a general theory of interpretations of axiomatic set theory. It is the branch of logic studying mathematical structures by considering first-order sentences which are true of those structures and the sets which are definable in those structures by first-order formulas. Mathematical structures obeying axioms in a system are called models of the system.
A core concept in metamathematics and the multicomputation paradigm is that of the ruliad. The ruliad results from following all possible computational rules in all possible ways. As the ultimate limit of all abstraction and generalization, it takes the infinite limits of all possible rules, all possible initial conditions, and all possible steps. Mathematics, as we humanely understand, emerges from the ruliad, when the rules are represented in certain ways that make the mathematical axioms and theories recognizable. Symbolic expressions form the nodes of the ruliad expressed as a graph. It may be a simple expression, a one-way rule, or a two-way rule. It may or may not contain pattern variables. Symbolic expressions that are assumed to be true (or have a non-zero prior probability in inductive logic) are called axioms.
The process of creating the ruliad is based on entailments. An entailment graph starts by applying an axiom (or a set of axioms) on an initial condition (or a set of initial conditions). This leads to new symbolic expressions (or nodes on the entailment graph). These nodes can again interact with each other to continue the process of entailment. The full ruliad is of course the graph when we consider all possible axioms and initial conditions. Entailment graphs admit a notion of time and parallelism. This becomes more succinct via causal graphs that depict the independence and interdependence within the edge-dual of the entailment graphs. The process of applying the rule is denoted by event nodes, while directed edges between event nodes denote their causal dependencies.
A significant volume of research has already been carried out in the past decades under the Wolfram Science projects. It enables us to use the multicomputation paradigm to have a complete global view of possible rules and their relations. In this work, we explore the ruliad from a different perspective, a local view that can be sampled from this global view.
Within the Wolfram Metamathematics[1] and Physics[2] project, observers have been mentioned in multiple contexts[3,4], and are a well-studied phenomenon in physics[5,6]. This project is a step towards a formal definition and function within the Wolfram Language framework to allow empirical experimentation.
First-person metamathematics
First-person metamathematics
Let us get an intuitive understanding of this project from video games. Video games allow different camera views, typically, these two common perspectives:
◼
You are embedded as a character within the game world, looking through the eyes (or just over the shoulder) of the protagonist, for example, in Call of Duty, or Temple Run.
◼
You have a birds-eye view of the game world and its dynamics, for example, in Rise of Nations, or PacMan.
Often we do not have access to the global view or having access to it makes the game trivial. Solving a maze, for example, is far easier if given access to a map and our position on it. Now imagine being lost in a garden maze or playing PacMan in first-person. To find our way out, we need to do what robotics engineers call, Simultaneous Localization and Mapping.
This is closer to our situation in discovering scientific truths - we are embedded within the Universe - a part trying to make sense of the whole.
Guessing the fabric of reality
Guessing the fabric of reality
Scientific models allow us to understand past observations by an observer, compress those into a short theory and thereby help in predicting future observations for the observer.This urge is rather primitive and has enabled us to survive over environmental dynamics[7]. Building a tree house allowed our ancestors to survive a surprise bear attack.
Besides its predictive use, scientific models often provide an elegant ontology that helps us to appreciate the fabric of reality governing the universe. Over the last few centuries, making ontological claims in science is increasingly discouraged. There was a time in history when advocating the precedence of a heliocentric model was life-threatening. As far as cosmology is concerned, this debate was solved once and for all by Einstein's general theory of relativity, where there is no preferred reference frame. With the ontology of curved space-time based on mass-energy and an equation form that has stood the test of time in generalizing and explaining various phenomena in the universe - this has become one of the bedrocks of modern physics. Similar notions of relational observables[8] can be used to define operational models in quantum mechanics.
It is important to note that the ontology is fundamentally inaccessible[9], leading to various interpretations, with no feasible experiments to prioritize or falsify them. Debates among the respective advocates have remained under the purview of rules of thumb in the philosophy of science, like Occam's razor. Results from experiments, as well as, elegant acceptable ontological explanations have a relational factor dependent on the experimenter.
An observer is continually projecting the environment to perceptions it is capable of distinguishing and explanations it is capable of understanding.
Beyond the limits of epistemology
Beyond the limits of epistemology
Epistemic models in science, almost by definition, prevents us from going beyond[10,11] and commenting on the ontology. The global reference frame of the metamathematics space, while being very useful from the perspective of understanding correspondence and categorical links - inherits the same caveats as that of physics. There is no physically possible observer perspective outside the system - God-view of the full ruliad of metamathematics, so to speak. The ruliad, from the global view, is general and thus agnostic to phenomena that typically limit observers - notions like consistency, causality, locality, etc. To quote the movie, Mr. Nobody, “Every path is the right path. Everything could've been anything else. And it would have just as much meaning”. However, that leaves the clues on why we perceive mathematics as structured, embedded in the definition of an observer.
This is what we address in this work. We will strive to minimize our assumption of a structured metamathematical space. We will explore if the very definition of the observer is capable of creating a valid structure - for the observer.
Definitions
Definitions
Observer
Observer
An observer is defined as an unordered set of rules.
The initial condition is one of those axioms, which can either be a simple expression or a one/two way rule. Models can also be expressed as a set of axioms. We currently treat the initial condition separately. A fully general treatment is left for a future generalization using token-event graphs instead of entailment graphs.
The entailment fabric generated by an observer defines the observable region of the ruliad for the observer. It is very well possible that certain expressions/nodes of the full ruliad are not reachable given the set of axioms. Or adding certain axioms allow new nodes to be reachable. Can there be conflicts among axioms leading to paradoxes or inconsistencies? More on that later. Is there a set of axioms that will allow the observer to reach every node in the ruliad? Perhaps not, due to Gödel's incompleteness theorem.
Resources
Resources
Computational resources bound an observer’s capabilities in the metamathematics multiverse. In computer engineering, we deal with various limitations - runtime, data memory, program memory, precision, accuracy, energy cost, etc. Computers being symbolic systems, each of these has a correspondence in the entailment process. We can define the limits of observation in multiple way, for example, by limiting the size of the expressions, the number of variables in the expressions, how far the proof-path of the expressions are from the axioms, etc.
For our initial exploration, we consider the number of nodes the observer is capable of exploring. We call this its trot limit. This defines the maximum number of nodes in the entailment fabric that the observer explores.
Experiments
Experiments
Now with that conceptual background, let us construct the Wolfram Language function that implements the observer perspective.
The RuliadTrotter function takes in a definition of the observer (as a finite set of rules the observer assumes to be true), and a limit of resources (as the number of nodes the observer can explore). The set of rules can contain axioms, models and initial conditions. The resources define the proof paths the observer is capable of discovering and the possible foliations on the corresponding causal graphs.
Before we describe how the function works, let’s look at some examples of observers.
Examples of observers
Examples of observers
While any set of rules potentially defines an observer, it is easier to appreciate an observer defined as some of the standard axiom systems of mathematics.
Here we present 4 such observers, each equipped with a known axiom system.
Here we present 4 such observers, each equipped with a known axiom system.
Unital magma theory axioms
In[]:=
axiomsUMT={1∘a_<->a_,a_∘1<->a_};@GridPartition[ResourceFunction["UnformalizeSymbols"][axiomsUMT],1],Frame->All,Frame->All,BackgroundLighter["AxiomColor"],.8,FrameStyle->GrayLevel[.75],ItemStyle["AxiomFontColor"],Spacings->2
Out[]=
1∘a_a_ |
a_∘1a_ |
Let’s have a quick look of how these axioms entail a simple initial condition of
In[]:=
inits={1∘1};@GridPartition[ResourceFunction["UnformalizeSymbols"][inits],1],Frame->All,Frame->All,BackgroundLighter["AxiomColor"],.8,FrameStyle->GrayLevel[.75],ItemStyle["AxiomFontColor"],Spacings->2
Out[]=
1∘1 |
For 1 step,
In[]:=
PacletInstall["https://wolfr.am/Multicomputation.paclet",ForceVersionInstall->True];<<Wolfram`Multicomputation`axiomsUMT1={1∘a_->a,a_->1∘a,a_∘1->a,a_->a∘1};inits={1∘1};hgm=HypergraphMulti[inits,axiomsUMT1];hgm["Graph",1,VertexShapeFunctionFunction[{pos,v,size},Inset[Framed[Style[Wolfram`Multicomputation`FromLinkedHypergraph[v,"Expression"],Bold,Gray],FrameStyleLightBlue,BackgroundLightCyan],pos,size]],PerformanceGoal"Quality",EdgeStyleDirective[RGBColor[0.4,0.4,0.6,0.4]],GraphLayout"LayeredDigraphEmbedding",AspectRatio->1/3.5]
Out[]=
And the structure for 2 steps,
In[]:=
PacletInstall["https://wolfr.am/Multicomputation.paclet",ForceVersionInstall->True];<<Wolfram`Multicomputation`axiomsUMT1={1∘a_->a,a_->1∘a,a_∘1->a,a_->a∘1};inits={1∘1};hgm=HypergraphMulti[inits,axiomsUMT1];hgm["Graph",2,EdgeStyleDirective[RGBColor[0.4,0.4,0.6,0.4]],GraphLayout"LayeredDigraphEmbedding",AspectRatio->1/3]
Out[]=
Semigroup theory axioms
Semigroup theory axioms
In[]:=
axiomsSGT={a_∘(b_∘c_)<->(a_∘b_)∘c_};@GridPartition[ResourceFunction["UnformalizeSymbols"][axiomsSGT],1],Frame->All,Frame->All,BackgroundLighter["AxiomColor"],.8,FrameStyle->GrayLevel[.75],ItemStyle["AxiomFontColor"],Spacings->2
Out[]=
a_∘(b_∘c_)(a_∘b_)∘c_ |
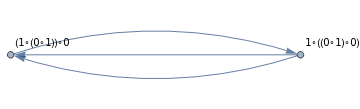
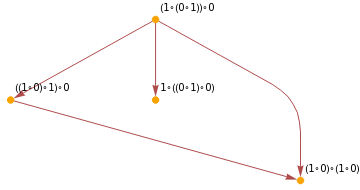
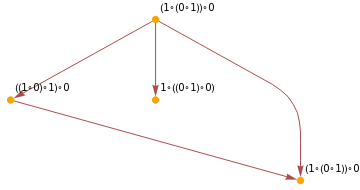
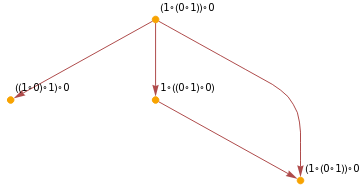
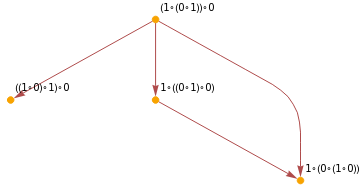
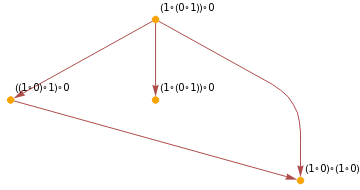
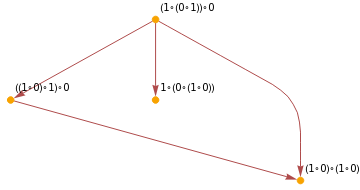
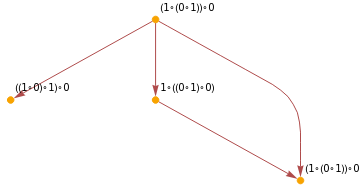
Entailing these on the initial condition of
In[]:=
inits={1∘((0∘1)∘0)};@GridPartition[ResourceFunction["UnformalizeSymbols"][inits],1],Frame->All,Frame->All,BackgroundLighter["AxiomColor"],.8,FrameStyle->GrayLevel[.75],ItemStyle["AxiomFontColor"],Spacings->2
Out[]=
1∘((0∘1)∘0) |
For 1 step,
In[]:=
PacletInstall["https://wolfr.am/Multicomputation.paclet",ForceVersionInstall->True];<<Wolfram`Multicomputation`axiomsSGT1={a_∘(b_∘c_)->(a∘b)∘c,(a_∘b_)∘c_->a∘(b∘c)};inits={1∘((0∘1)∘0)};hgm=HypergraphMulti[inits,axiomsSGT1];hgm["Graph",1,VertexShapeFunctionFunction[{pos,v,size},Inset[Framed[Style[Wolfram`Multicomputation`FromLinkedHypergraph[v,"Expression"],Bold,Gray],FrameStyleLightBlue,BackgroundLightCyan],pos,size]],PerformanceGoal"Quality",EdgeStyleDirective[RGBColor[0.4,0.4,0.6,0.4]],GraphLayout"LayeredDigraphEmbedding",AspectRatio->1/3.5]
Out[]=
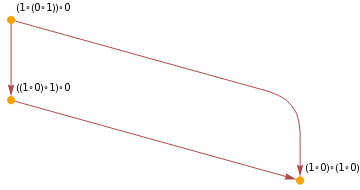
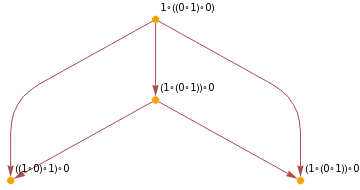
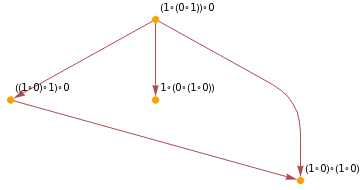
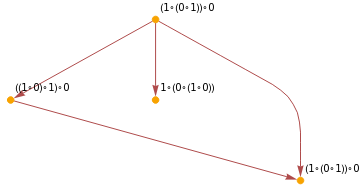
And the structure for 2 steps,
Out[]=
Monoid theory axioms
Monoid theory axioms
Out[]=
1∘a_a_ |
a_∘1a_ |
a_∘(b_∘c_)(a_∘b_)∘c_ |
Entailing these axioms now on the same initial condition of
Out[]=
1∘((0∘1)∘0) |
For 1 step,
Out[]=

The structure for 2 steps,
Out[]=
Group theory axioms
Group theory axioms
Out[]=
1∘a_a_ |
a_∘1a_ |
a_∘(b_∘c_)(a_∘b_)∘c_ |
a_∘ a_ |
Entailing these axioms on the same initial condition of
Out[]=
1∘((0∘1)∘0) |
For 1 step,
Out[]=

The structure for 2 steps,
Out[]=
We can appreciate from this that, typically, as the number and variety of axioms increases, the entailed structure gets more extensive and complex. Eventually, in the limit of taking all possible axioms (that itself is an infinite set), the entailment for an infinite timestep is what we call the full ruliad.
An observer capable of entailing the full ruliad is as large as the ruliad itself! That observer always has an axiom up its sleeve that can connect any pair of nodes on the ruliad, just like Borges’ Library of Babel. However, the caveat with that generality is that observer finds the entire ruliad structureless.
Fortunately (or maybe, unfortunately), such observers are not physically possible even in metamathematics. In the following section, we will demonstrate how an observer samples the ruliad with a finite set of axioms and models.
Steps in the function
Steps in the function
We will explain the steps involved in understanding the process of observing by inspecting the RuliadTrotter function with an example.
◼
The function accepts two arguments and is defined as:
In[]:=
RuliadTrotter::usage="RuliadTrotter[rules_,trots_] implements an observer with a specified finite list of rules (defining the set of axioms, the set of models, and initial conditions) and trots (defining the limit of computational resources)";RuliadTrotter[rules_,trots_]:={rules,trots}?RuliadTrotter
Out[]=
◼
The 1st set of rules define the axioms.
For this demonstration, let us take the monoid theory axioms. We need to convert the 3 two-way rules to 6 one-way rules.
For this demonstration, let us take the monoid theory axioms. We need to convert the 3 two-way rules to 6 one-way rules.
Out[]=
a_∘(b_∘c_)(a∘b)∘c |
(a_∘b_)∘c_a∘(b∘c) |
1∘a_a |
a_1∘a |
a_∘1a |
a_a∘1 |
◼
The 2nd set of rules are the valid models that can be defined as constant one way rules.
For example, the model for the Boolean NAND operation
For example, the model for the Boolean NAND operation
Out[]=
∘ | 0 | 1 |
0 | 1 | 1 |
1 | 1 | 0 |
can be defined as the set of axioms,
Out[]=
0∘01 |
0∘11 |
1∘01 |
1∘10 |
The model for the Boolean XOR operation
Out[]=
∘ | 0 | 1 |
0 | 0 | 1 |
1 | 1 | 0 |
can similarly be defined by,
Out[]=
a∘a1 |
0∘11 |
1∘01 |
For the demonstration, let us find the models consistent with the monoid axioms.
Out[]=
∘ | 0 | 1 |
0 | 0 | 0 |
1 | 0 | 1 |
∘ | 0 | 1 |
0 | 1 | 0 |
1 | 0 | 1 |
these correspond to the following axioms,
Out[]=
0∘0a |
a_∘ a_ |
1∘11 |
We will not put additional model constraints for the demonstration.
◼
The 3rd set of rules are assigned as the initial conditions.
For this demonstration, let us take a simple (yet interesting enough to appreciate the dynamics of the monoid axioms) expression:
For this demonstration, let us take a simple (yet interesting enough to appreciate the dynamics of the monoid axioms) expression:
Out[]=
1∘((0∘1)∘0) |
◼
The other parameter to the function defines the computational bound. More on that later.
◼
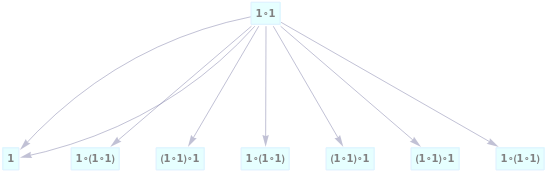
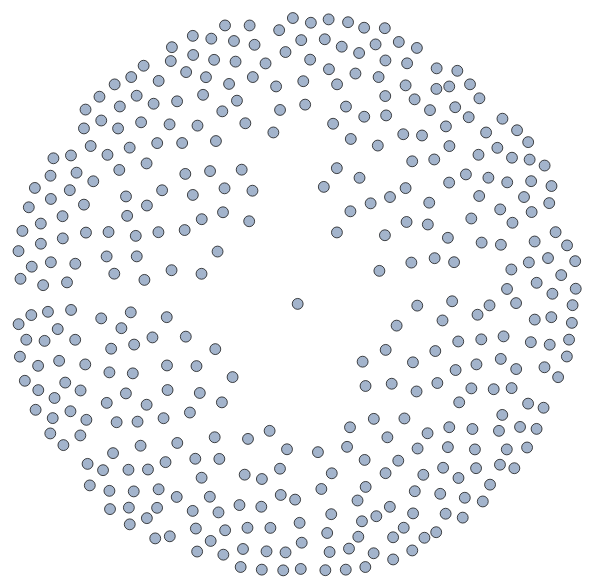
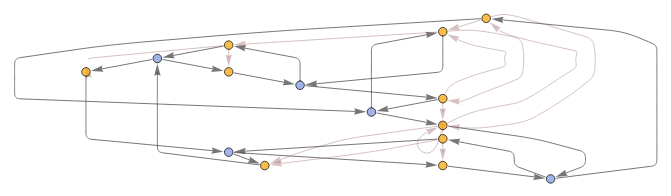
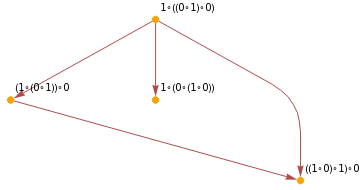
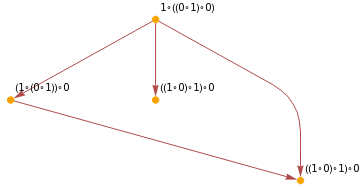
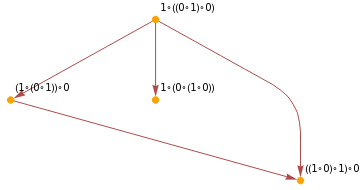
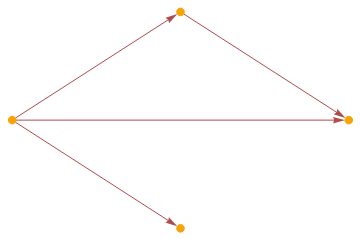
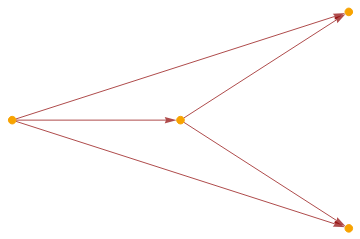
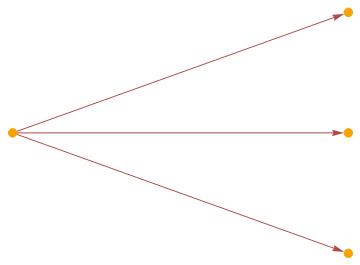
The subset of all expressions reachable by the observer using the trot limit can be shown without any specific structure. This corresponds to a subset of expressions from the metamathematical multiverse that the observer is capable of exploring (though it hasn’t yet, and we don’t yet know in which ordering it is constrained to explore these or if there is some choice possible). The initial condition is at the center.
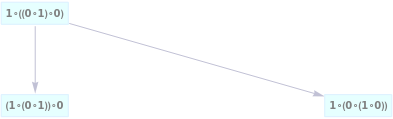
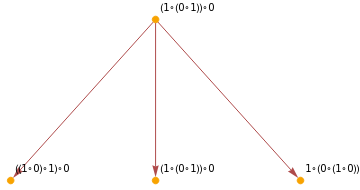
The expressions reachable within 1 time step are:
The expressions reachable within 1 time step are:
Out[]=
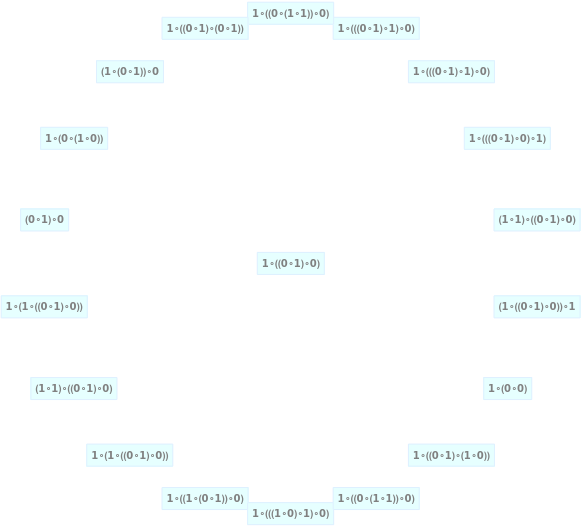
With 1 more step, we can already see many nodes popping up.
Out[]=
◼
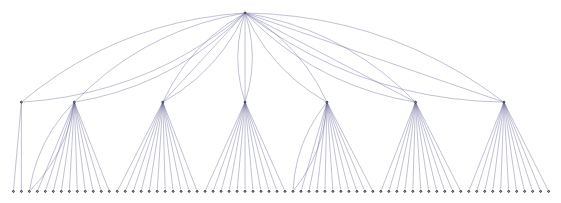
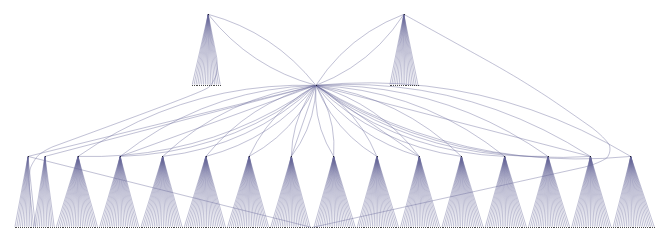
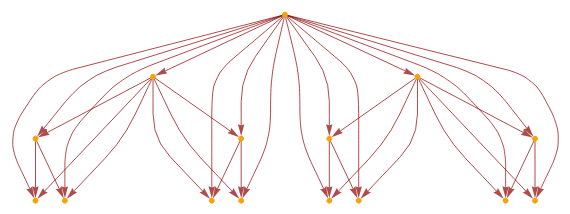
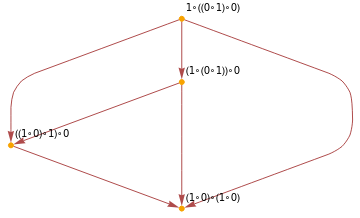
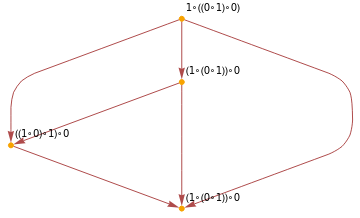
How are these nodes ordered? This is given by the entailment fabric. It induces an ordering on the set of expressions based on the initial conditions.
Out[]=
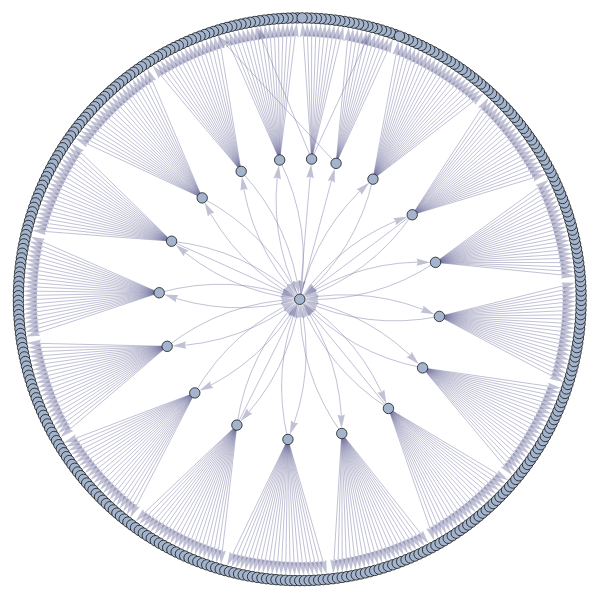
That looks like an eye, as if the observer is at the center of its universe! This is the first-person view of the ruliad for the observer.
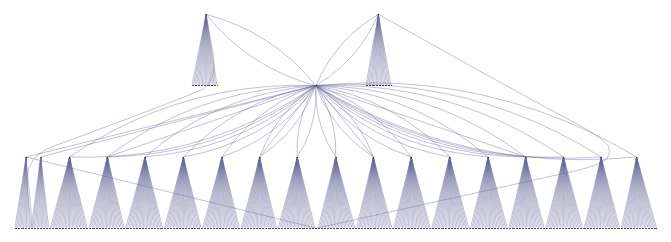
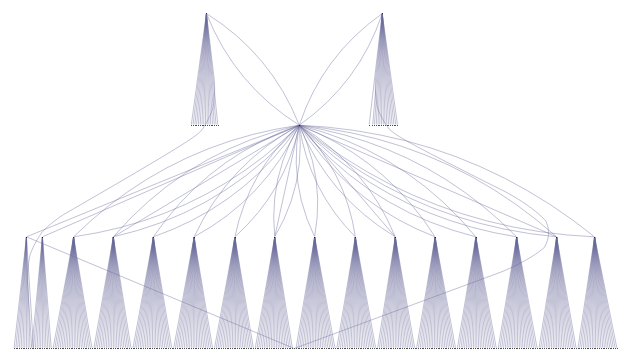
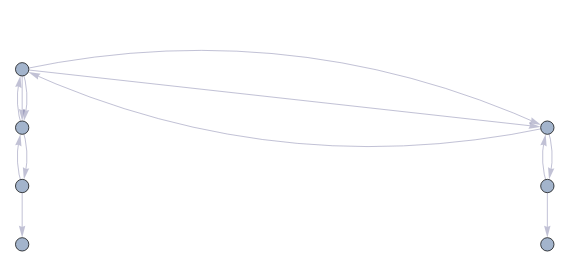
Of course, we can also plot the observer’s limited viewpoint on the canonical global view.
Out[]=
◼
Just looking at this graph, while we can understand the orders in which the expressions/nodes can be traversed, it is not clear which axiom the observer used to explore the node. To understand that, we can use the corresponding causal graph for the entailment fabric.
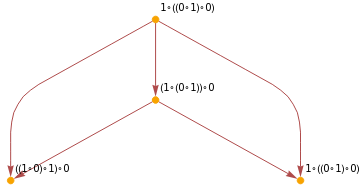
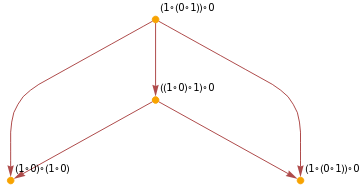
The entailment for the monoid axioms already looks too complex. To understand it intuitively and study more closely, let’s use the semigroup theory axioms instead
Out[]=
a_∘(b_∘c_)(a∘b)∘c |
(a_∘b_)∘c_a∘(b∘c) |
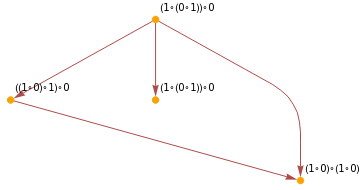
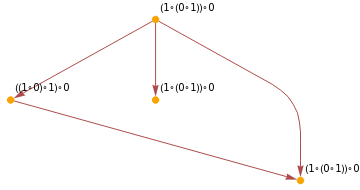
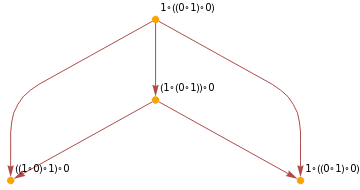
The entailment graph for 2 steps are,
Out[]=
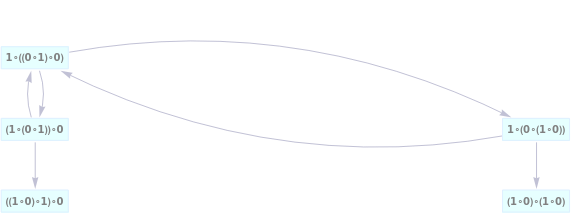
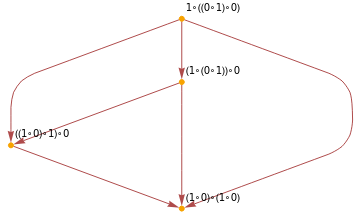
The corresponding causal graph (the node labels denoting the output of the event) is,
Out[]=
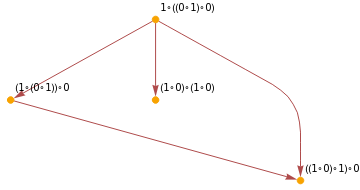
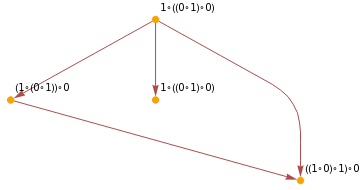
For 3 steps, the structure is,
Out[]=
The corresponding causal graph structure is,
Out[]=
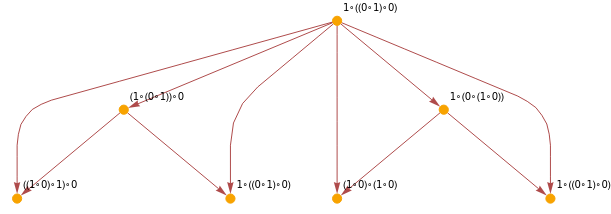
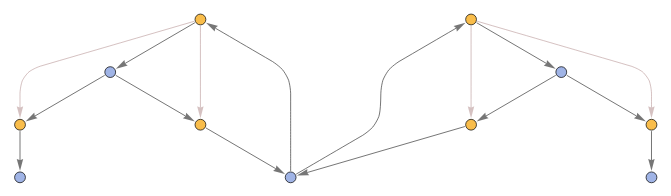
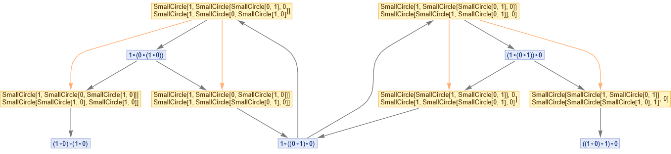
◼
We can also plot the evolution graph (i.e. the joined entailment and causal) graphs, to get a complete picture of which axioms are used in which steps of the entailment. Note that this doesn’t show the causal event corresponding to initialization.
For 2 steps,
Out[]=
In more verbose expression form:
In[]:=
axioms={a_∘(b_∘c_)->(a∘b)∘c,(a_∘b_)∘c_->a∘(b∘c)};inits={1∘((0∘1)∘0)};trots=2;ResourceFunction["MultiwayOperatorSystem"][axioms,inits,trots,"EvolutionCausalGraph",GraphLayout->"LayeredDigraphEmbedding",AspectRatio->1/4]
Out[]=
For 3 steps,
Out[]=
◼
Now, we will explore how the computational bounds restrict these graphs. Given the trots limit, we can find all such paths in the entailment graph (note, exploring a node also allows any back connection if possible, this can be mitigated by counting the number of causal events encountered).
Out[]=
,

,

,

,

,

,

,

,

,

,

,

,

,

,

,

,

,

,

,
,

,

,

,

,

,

,

,

,

,
,

,

,

,

,

,


◼
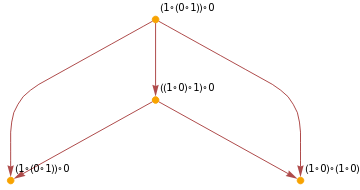
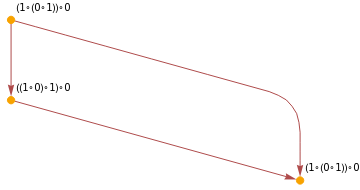
Similarly, we can find trots on the causal graph, that defines the number of update events the observer is capable of computing.
Out[]=
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
,
We observe that these 71 graphs are of 5 distinct types.
Out[]=

◼
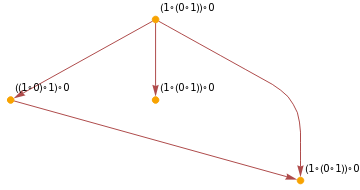
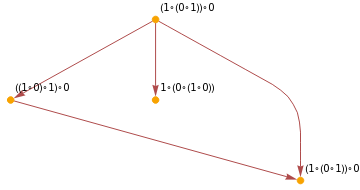
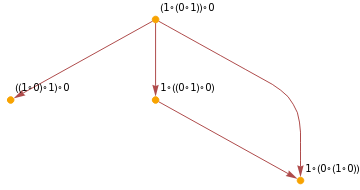
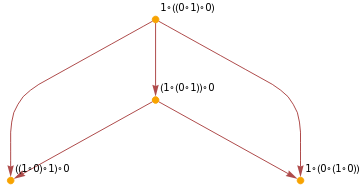
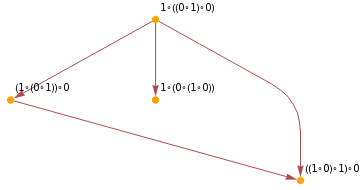
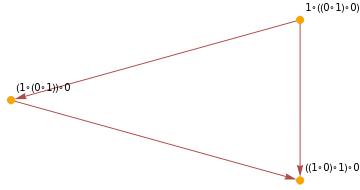
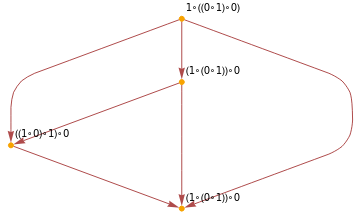
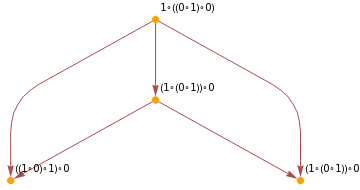
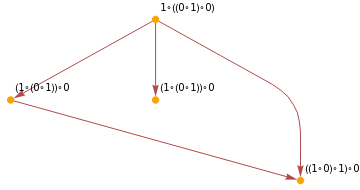
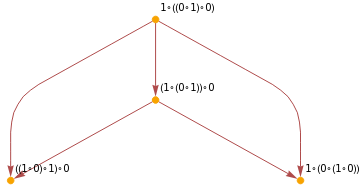
Each of these trots on the causal graph can be foliated to signify the various equivalent temporal ordering of trotting (the observer will reach the same set of nodes, but in a different traversal order)
Out[]=
,
Out[]=
Out[]=
{
}

Out[]=
{
}

Out[]=
We find that only graphs of the first type have 2 different foliation. But there are 32 such causal trots. For the rest, there is only one possible order for the observer to explore these set of entailment nodes using three resources. Thus in total, there are 32*2 + (71-32) = 103 temporal order in which this computationally bounded observer equipped with the semigroup axioms can explore the ruliad.
Future directions
Future directions
The framework developed in this project allows defining an observer as a set of rules consisting of axioms, models, and initial conditions. A bound on the number of nodes specifies the computational resource that the observer can spend in exploring the ruliad. Moving further, this will enable experimenting with various perspectives (reference frames) and computational capabilities. Some suggestive future directions are:
◼
The initialization expression and the one-way pattern rule axioms can be generalized to any type of symbolic expression. In this case, the entailment fabric and the causal graph would generalize to a token-event graph.
◼
The dynamics of the trots can be studied with respect to axioms and resources. For example, one can study (i) how drastically the entailment fabric changes on adding/removing an axiom, which can throw insight on the relative importance of each axiom in the set, (ii) how some axioms are incompatible and lead to contradictions or logical paradoxes, and how they can be resolved by adding some specific axiom, (iii) how adding an axiom can make a target expression reachable/deducible without changing the resources.
◼
The outputs from multiple observers with different axioms can be contrasted. For example, one can study (i) overlap in entailment fabric (or its lack thereof) between two observers with one common axiom and one personal axiom, (ii) how the proof path between two specific expressions can be trotted by two different observers (with a different set of axioms).
◼
The deductive structure of entailment can be relaxed by assigning a probabilistic edge-weight corresponding to the Bayesian inference priors. This would enable observers capable of inductive inference. Similarly, a further generalization by enabling quantum amplitude as edge-weight (norm-2 probability) can be used to study quantum observers[14].
◼
While we defined the observer as a set of nodes within the ruliad, our observer still cannot move. The observer is currently perched on an observatory frozen in space-time. Our experiments allow us to understand the extent and direction of the different landscapes the observer is capable of viewing. To release the observer from this shackle, we need to define an embedded observer. An observer which is capable of moving around in the ruliad, while maintaining its identity (a mutable set of axioms, akin to the Ship of Theseus). Research[12,13] in this direction would enable many more scientific insights.
◼
In a conceptual rethinking, the ruliad can be interpreted as the collective observations from all possible observers. This leaves us with the question, will this bottom-up ruliad be the same as the top-down version?
Keywords
Keywords
◼
Observers
◼
Computational resource bounds
◼
Metamathematics
Acknowledgements
Acknowledgements
I wish to extend a warm expression of gratitude to James Boyd for accepting my project proposal, and refining it over multiple sessions with me. Thank you Nikolay Murzin, for your intensive support in getting the codes working. Though I was not well acquainted with the Wolfram Language and Category theory, the patient guidance from my mentors eventually helped me get my proposal to fruition. To my fellow Wolfram Summer School participants, though I couldn’t meet you in person, we shared virtual space, and even across timezones, it felt like being physically in the team. Lastly, I am grateful for Stephen Wolfram’s interest in this project and the wise words of advice during the project meetings.
References
References
◼
[1]: Wolfram, S. (2022). The Physicalization of Metamathematics and Its Implications for the Foundations of Mathematics. arXiv preprint arXiv:2204.05123.
◼
[2]: Wolfram, S. (2020). A class of models with the potential to represent fundamental physics. arXiv preprint arXiv:2004.08210.
◼
[3]: S. Wolfram (2021), “The Concept of the Ruliad”. writings.stephenwolfram.com/2021/11/the-concept-of-the-ruliad.
◼
[4]: S. Wolfram (2021), “Why Does the Universe Exist? Some Perspectives from Our Physics Project”. writings.stephenwolfram.com/2021/04/why-does-the-universe-exist-some-perspectives-from-our-physics-project.
◼
[5]: Wheeler, J. A. (2018). Information, physics, quantum: The search for links (pp. 309-336). CRC Press.
◼
[6]: Müller, M. P. (2020). Law without law: from observer states to physics via algorithmic information theory. Quantum, 4, 301.
◼
[7]: Zenil, H., Gershenson, C., Marshall, J. A., & Rosenblueth, D. A. (2012). Life as thermodynamic evidence of algorithmic structure in natural environments. Entropy, 14(11), 2173-2191.
◼
[8]: Rovelli, C. (1996). Relational quantum mechanics. International Journal of Theoretical Physics, 35(8), 1637-1678.
◼
[9]: Hutter, M. (2010). A complete theory of everything (will be subjective). Algorithms, 3(4), 329-350.
◼
[10]: Calude, C. S., Meyerstein, F. W., & Salomaa, A. (2013). The universe is lawless or "pantôn chrêmatôn metron anthrôpon einai". In A Computable Universe: Understanding and Exploring Nature as Computation (pp. 525-537).
◼
[11]: Fields, C. (2018). Sciences of observation. Philosophies, 3(4), 29.
◼
[12]: Fields, C., Hoffman, D. D., Prakash, C., & Prentner, R. (2017). Eigenforms, interfaces and holographic encoding. Constructivist Foundations, 12(3), 265-291.
◼
[13]: Orseau, L., & Ring, M. (2012, December). Space-time embedded intelligence. In International Conference on Artificial General Intelligence (pp. 209-218). Springer, Berlin, Heidelberg.
◼
[14]: Sarkar, A. (2022). Applications of Quantum Computation and Algorithmic Information: for Causal Modeling in Genomics and Reinforcement Learning.