The documentation for the Wolfram Language and the FrontEnd are great--and the working examples provide useful starting points.
Every once in a while, I find a case where it is difficult to figure out how to do something and can’t find a working example. After struggling a bit, I might get something working.
That working example might be useful for someone else. I show here a few additional minimal working examples for NMinimize.
I’d like to encourage others who find--what they consider to be--good working examples, and then post them to the community. Something like a crowd-sourced appendix to the documentation.
I wonder if it might be possible version of “ResourceAdditionalDocumentation” constructed in a parallel fashion to ResourceData or ResourceFunction.
Every once in a while, I find a case where it is difficult to figure out how to do something and can’t find a working example. After struggling a bit, I might get something working.
That working example might be useful for someone else. I show here a few additional minimal working examples for NMinimize.
I’d like to encourage others who find--what they consider to be--good working examples, and then post them to the community. Something like a crowd-sourced appendix to the documentation.
I wonder if it might be possible version of “ResourceAdditionalDocumentation” constructed in a parallel fashion to ResourceData or ResourceFunction.
Extended examples from the documentation
Extended examples from the documentation
I recently ran into one where I was trying to minimize a function of a set of 2d points. It took me a while to get things to work, but I thought I would share here for anyone who is trying to do something similar.
Geometry Problem (4)
Geometry Problem (4)
This is an example from the documentation for NMinimize: Example from the documentation
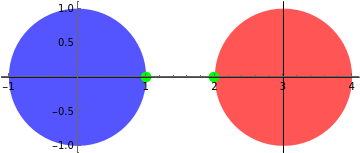
Find the minimum distance between two disks of radius 1 centered at={0,0} and ={2,1}. Let be a point on disk 1. Let be a point on disk 2. The objective is to minimize subject to constraints :
Find the minimum distance between two disks of radius 1 centered at
c
1
c
2
p
1
p
2
||-||
p
1
p
2
||||≤1,||-||≤1
p
1
p
2
c
2
This finds the two points, p1 and p2, that are closest. p1 and p2 are in separate fixed disks.
In[]:=
res=NMinimize[{Norm[p1-p2],c2=={2,1},Norm[p1]≤1,Norm[p2-c2]≤1},{p1∈Vectors[2,Reals],p2∈Vectors[2,Reals]}]
Out[]=
{0.236069,{p1{0.894427,0.447213},p2{1.10557,0.552787}}}
visualize:
In[]:=
Graphics[{{Lighter[Blue],Disk[]},{Lighter[Red],Disk[{2,1}]},{Green,PointSize[0.03],Point[{p1,p2}/.res〚2〛]}},Axes->True]
Out[]=
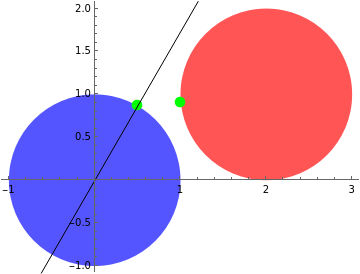
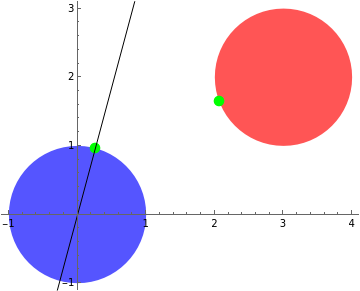
Let’s add a new constraint that p1 must lie along a line with a fixed angle.
NMinimize couldn’t generate initial points without help, nevertheless a plausible solution is obtained
NMinimize couldn’t generate initial points without help, nevertheless a plausible solution is obtained
In[]:=
res=NMinimize[{Norm[p1-p2],c2=={2,1},Norm[p1]≤1,Norm[p2-c2]≤1,Element[p1,InfiniteLine[AngleVector[Pi/3],-AngleVector[Pi/3]]]},{p1∈Vectors[2,Reals],p2∈Vectors[2,Reals]}]

p1
2
2
Abs[Plus[2]]
2
Abs[Plus[2]]
Out[]=
{0.505971,{p1{0.5,0.866025},p2{1.00396,0.911038}}}
In[]:=
Graphics[{{Lighter[Blue],Disk[]},{Lighter[Red],Disk[{2,1}]},{Green,PointSize[0.03],Point[{p1,p2}/.res〚2〛],{Black,InfiniteLine[AngleVector[Pi/3],-AngleVector[Pi/3]]}}},Axes->True]
Out[]=
To eliminate NMinimize’s warning, one can use a Method that take InitialPoints. NelderMead is one such Method
The syntax for adding initial points isn’t obvious. The following will generate an error
The syntax for adding initial points isn’t obvious. The following will generate an error
In[]:=
res=NMinimize[{Norm[p1-p2],c2=={2,1},Norm[p1]≤1,Norm[p2-c2]≤1,Element[p1,InfiniteLine[AngleVector[Pi/3],-AngleVector[Pi/3]]]},{p1∈Vectors[2,Reals],p2∈Vectors[2,Reals]},Method{"NelderMead","InitialPoints"->{AngleVector[Pi/3],RandomPoint[Disk[{2,1},1]]}}]
1
2
3
2
p1
2
2
Abs[Plus[2]]
2
Abs[Plus[2]]
Out[]=
{0.505971,{p1{0.5,0.866025},p2{1.00396,0.911038}}}
In[]:=
Graphics[{{Lighter[Blue],Disk[]},{Lighter[Red],Disk[{2,1}]},{Green,PointSize[0.03],Point[{p1,p2}/.res〚2〛],{Black,InfiniteLine[AngleVector[Pi/3],-AngleVector[Pi/3]]}}},Axes->True]
Out[]=
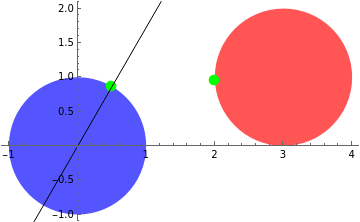
The Initial points must be a list of flat lists and ordered in the same way the variables are ordered.
In[]:=
res=NMinimize[{Norm[p1-p2],c2=={3,1},Norm[p1]≤1,Norm[p2-c2]≤1,Element[p1,InfiniteLine[AngleVector[Pi/3],-AngleVector[Pi/3]]]},{p1∈Vectors[2,Reals],p2∈Vectors[2,Reals]},Method{"NelderMead","InitialPoints"->{Flatten[{AngleVector[Pi/3],-AngleVector[Pi/3]}]}}]
Out[]=
{1.50359,{p1{0.5,0.866025},p2{2.00143,0.946506}}}
In[]:=
Graphics[{{Lighter[Blue],Disk[]},{Lighter[Red],Disk[{3,1}]},{Green,PointSize[0.03],Point[{p1,p2}/.res〚2〛],{Black,InfiniteLine[AngleVector[Pi/3],-AngleVector[Pi/3]]}}},Axes->True]
Out[]=
Let’s suppose we want to add a degree of freedom to the second disk. Fixing the center of the second disk and not using it as a constraint doesn’t work.
In[]:=
Block[{angle=5Pi/12,res,center2={3,1}},res=NMinimize[{Norm[p1-p2],Norm[p1]≤1,Norm[p2-center2]≤1,Element[p1,InfiniteLine[AngleVector[angle],-AngleVector[angle]]]},{p1∈Vectors[2,Reals],p2∈Vectors[2,Reals]},Method{"NelderMead","InitialPoints"->{Flatten[{AngleVector[angle],RandomPoint[Disk[center2,1]]}]}}];Graphics[{{Lighter[Blue],Disk[]},{Lighter[Red],Disk[{2,1}]},{Green,PointSize[0.03],Point[{p1,p2}/.res〚2〛],{Black,InfiniteLine[AngleVector[angle],RandomPoint[Disk[center2,1]]]}}},Axes->True]]
2
Abs[Plus[2]]
2
Abs[Plus[2]]
2
Abs[Plus[2]]
2
Abs[Plus[2]]
Out[]=
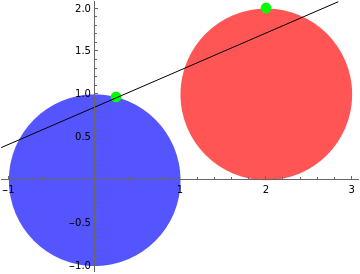
It can be fixed by using a local variable. Also, note the syntax for adding multiple initial guesses
In[]:=
Block[{angle=5Pi/12,res,fixedCenter={3,2}},res=Echo@NMinimize[{Norm[p1-p2],center2==fixedCenter,Norm[p1]≤1,Norm[p2-center2]≤1,Element[p1,InfiniteLine[AngleVector[angle],-AngleVector[angle]]]},{p1∈Vectors[2,Reals],p2∈Vectors[2,Reals]},Method{"NelderMead","InitialPoints"->{Flatten[{AngleVector[angle],RandomPoint[Disk[fixedCenter,1]]}],Flatten[{AngleVector[angle],RandomPoint[Disk[fixedCenter,1]]}]}}];Graphics[{{Lighter[Blue],Disk[]},{Lighter[Red],Disk[fixedCenter]},{Green,PointSize[0.03],Point[{p1,p2}/.res〚2〛],{Black,InfiniteLine[AngleVector[angle],-AngleVector[angle]]}}},Axes->True]]
»
{1.92974,{p1{0.258819,0.965926},p2{2.06436,1.64704}}}
Out[]=
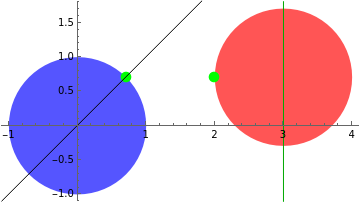
Suppose we want to have the center of the second circle have a degree of freedom as well. The center can be specified as a variable with a vector quantity, but an initial constraint is added for that degree of freedom.
In[]:=
Block[{angle=2Pi/8,res},res=Echo@NMinimize[{Norm[p1-p2],Norm[p1]≤1,Norm[p2-center2]≤1,Element[p1,InfiniteLine[AngleVector[angle],-AngleVector[angle]]],Element[center2,InfiniteLine[{3,0},{0,1}]]},{p1∈Vectors[2,Reals],p2∈Vectors[2,Reals],center2∈Vectors[2,Reals]},Method{"NelderMead","InitialPoints"->{Flatten[{AngleVector[angle],RandomPoint[Disk[{3,0},20]],{RandomReal[{-1,1}],3}}](*,Flatten[{AngleVector[angle],RandomPoint[Disk[center2,1]]}]*)}}];Graphics[{{Lighter[Blue],Disk[]},{Lighter[Red],Disk[center2]/.res〚2〛},{Green,PointSize[0.03],Point[{p1,p2}/.res〚2〛],{Black,InfiniteLine[AngleVector[angle],-AngleVector[angle]],Darker@Green,InfiniteLine[{3,0},{0,1}]}}},Axes->True]]
»
{1.29289,{p1{0.707107,0.707107},p2{2.,0.707107},center2{3.,0.707107}}}
Out[]=
Add another degree of freedom by allowing minimization of the angle of the black line (on which the solution p1 is constraint. The last variable (the angle) is no longer a vector.
The initial points are arranged to be consistent.
The initial points are arranged to be consistent.
In[]:=
Block[{res},res=Echo@NMinimize[{Norm[p1-p2],Norm[p1]≤1,Norm[p2-center2]≤1,Element[p1,InfiniteLine[AngleVector[angle],-AngleVector[angle]]],Element[center2,InfiniteLine[{3,0},{0,1}]]},{p1∈Vectors[2,Reals],p2∈Vectors[2,Reals],center2∈Vectors[2,Reals],angle∈Reals},Method{"NelderMead","InitialPoints"->{Flatten[{AngleVector[Pi],RandomPoint[Disk[{3,0},1]],RandomReal[{-1,1},2],Pi}]}}];Graphics[{{Lighter[Blue],Disk[]},{Lighter[Red],Disk[center2]/.res〚2〛},{Green,PointSize[0.03],Point[{p1,p2}/.res〚2〛],{Black,InfiniteLine[AngleVector[angle],-AngleVector[angle]]/.res[[2]],InfiniteLine[{3,0},{0,1}]}}},Axes->True]]
»
{1.,{p1{1.,3.18763×},p2{2.,2.64317×},center2{3.,2.64235×},angle4.39055×}}
-7
10
-7
10
-7
10
-7
10
Out[]=