Zero-Pole Cancellation in Transfer Functions
Zero-Pole Cancellation in Transfer Functions


When the transfer function of a system has poles in the right half-plane of the complex numbers, the system is unstable. While it is theoretically possible to design a proportional-derivative (PD) compensator to cancel the poles, in practice is it is difficult to create perfect pole-zero cancellation due to imprecision in the model.
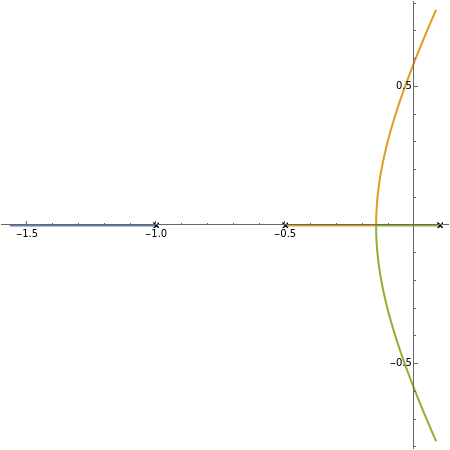
This Demonstration shows the locus root of a unity (negative) feedback system for three scenarios:
1. The plant (i.e. the instability) is not compensated, and the closed-loop system is unstable for some values of the gain.
2. The plant is compensated with a zero placed precisely at the unstable pole. Thus, the closed-loop system is stable for any value of gain.
3. There is a mismatch between the position of the zero and the unstable pole, causing the closed-loop system to be unstable.
Poles are marked by a cross "×" and zeros by a dot "·".