Spring-Mass-Damper (SMD) System with Proportional Derivative (PD) Controller
Spring-Mass-Damper (SMD) System with Proportional Derivative (PD) Controller



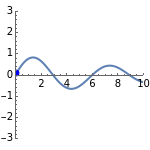
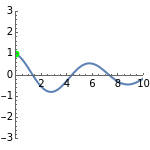
This Demonstration shows a spring-mass-damper system (SMD) with a proportional derivative (PD) controller in the time domain. The simulation includes a general solution for a free system with initial conditions (including under-, over-, and critically-damped conditions).
This Demonstration can be used as a teaching tool that lets you change the initial conditions and the parameters of the problem. You can experiment with the proportional and derivative controller gains to see the results in real time. The motion can also be automated, to simulate the dynamics in real time, using the trigger.