Sensor Fusion with Normally Distributed Noise
Sensor Fusion with Normally Distributed Noise


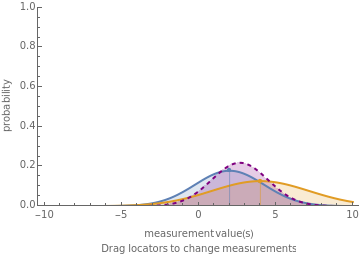
Given unbiased sensor measurements of a scalar quantity, each corrupted by independent, normally distributed noise with variance , the likelihood function for the true value (purple, dashed) is also a normal density.
n
2
σ
n