Rimless Wheel Locomotion
Rimless Wheel Locomotion


The rimless wheel was proposed by McGeer in 1990. It consists of a mass with equally spaced spikes extending outwards, like a wagon wheel without an outer rim. On a downhill slope, with the right mechanical design and under the right conditions, the trajectory of the device will automatically settle into a stable limit cycle without the need of control. The self-stabilizing walking gait is due purely to the interaction between the inertial property of the wheel and the force of gravity.
n
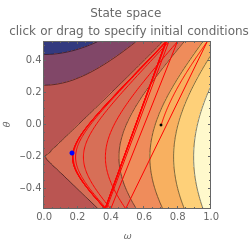
You can change the number of spikes and the slope using the sliders, and select the initial state of the wheel on the state-space plot. Under the right conditions, the motion trajectory converges to a limit cycle. Click the "run" button to see how the wheel walks. For some bad choices of parameters and initial conditions, the rimless wheel slows down or cannot take even one step.