Probabilistic Roadmap Method with Seven-Link Articulated Robot
Probabilistic Roadmap Method with Seven-Link Articulated Robot

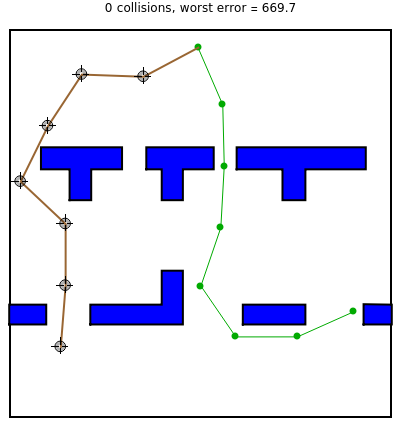
This Demonstration challenges you to move the seven-link robot (in brown) to match a goal configuration (in green) with the minimum number of collisions. Drag the locators to move the robot while avoiding collisions with the blue obstacles. This example was used in 1995 to introduce the probabilistic roadmap method (PRM), a robot motion-planning technique. Selecting "relative" movement changes the angle of one robot link at a time, and "absolute" rotates all subsequent links.