Probabilistic Roadmap Method
Probabilistic Roadmap Method


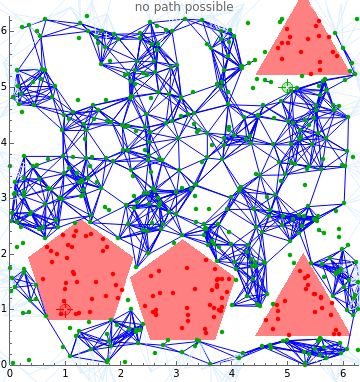
This Demonstration uses the probabilistic roadmap method (PRM) to connect configurations from an initial configuration (shown by a Locator) to a goal configuration. First, click the button "add 50 vertices" to randomly sample configurations and calculate if they collide with obstacles (red) or are safe (green). Next, select a "radius" value to try and connect safe vertices less than the radius distance into a roadmap. If a path from the initial to the goal configuration is found, it can be traversed using the "progress" slider. Although the PRM does not need to calculate the configuration space obstacles, you can make them visible by clicking the checkbox.