Joint Space and Tooling Space for Robot Motion Control
Joint Space and Tooling Space for Robot Motion Control



This Demonstration shows the move-joint and move-line methods that are used to control the manipulator trajectory of an industrial robot.
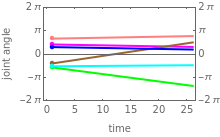
The move-joint method determines the initial and final poses of the planned trajectory, using inverse kinematics. All joint angles move linearly in the joint space (top-left plot). The trajectory of the end effector or tooling center point (TCP) moves along curves in the 3D tooling space (bottom plot).
The move-line method determines all of the end effector or tooling points from the initial and final poses, along a straight line, by inverse kinematics. The trajectory of the TCP moves linearly in the 3D tooling space (bottom plot), but all joint angles do not move linearly in the joint space (top-left plot).