Automatic Feedback Control of a Pendulum-and-Cart System
Automatic Feedback Control of a Pendulum-and-Cart System


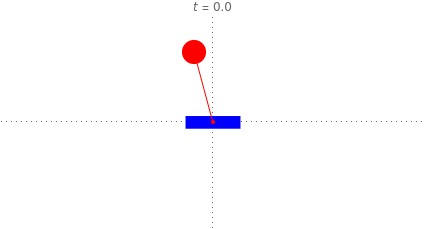
This Demonstration shows the response of a simple feedback control system that keeps a pendulum in a vertical upward or downward position.
A freely swinging pendulum with rod length and bob mass is attached to a cart of mass . The cart can move horizontally without friction and is subjected to two forces:
L
m
c
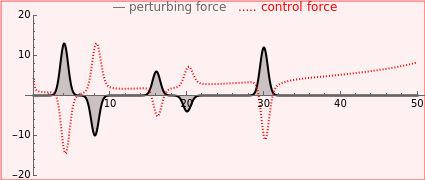
• A control (feedback) force to keep the pendulum in a vertical position.
• A perturbing force that pushes the cart and pendulum sideways and challenges the control system.
The "bumping" force profile can be controlled with the five locators in the upper plot or you can generate a random bumping profile with the button "set random bumps".
The pendulum can be controlled in one of two vertical equilibrium positions: the stable or "down" position and the unstable or "up" position. The bob position is traced to show the efficiency of the control system as indicated by the different perturbing force profiles.