In[]:=
deploy
Sat 24 Jul 2021 11:41:09
In[]:=
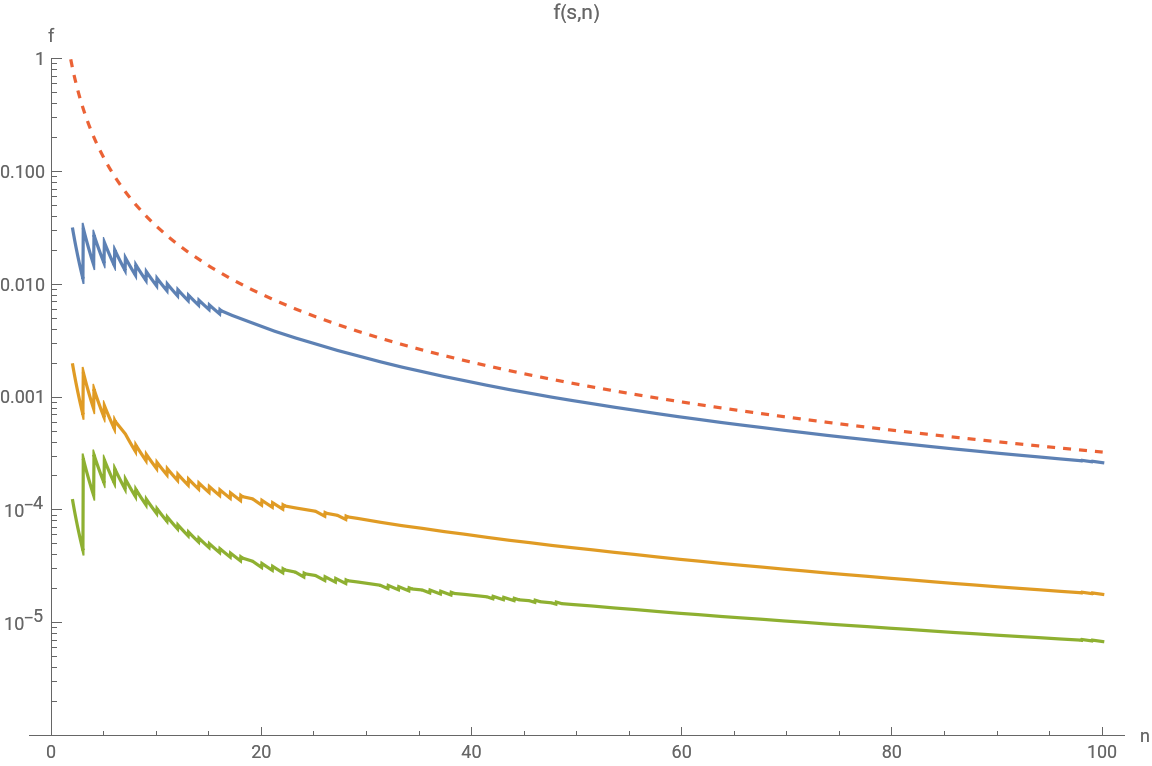
variance[s_,n_]:=evals=Table,{i,1,n}/.Indeterminate1;diff[a_,b_]:=;sum=Outer[diff,evals,evals]//Flatten//Total;(n+2)sum;(*Assuming{n>1,s>1},Integrate-,{i,1,n},{j,1,n}*)approxVariance[s_,n_]:=(n+2)*-2---2+HarmonicNumber[2s]+4Log[n];var2[n_]:=;LogPlot{variance[0,n],variance[1,n],variance[2,n],var2[n]},{n,1,100},PlotRange{,1},PlotLegends"s=0","s=1","s=2",,AxesLabel{"n","f"},ImageSizeLarge,PlotStyle{Automatic,Automatic,Automatic,Dashed},PlotLabel"f(s,n)"
2s
1.-
1
i
1
i
2
(a-b)
1
2
n
2
2s
1-
1
i
1
i
2s
1-
1
j
1
j
1
2
n
2
2+4s
(-1+n)
-1-4s
n
1+4s
2
HarmonicNumber[2s]
8
2
s
2
HypergeometricPFQ{1,1,1-2s},{2,2},
1
n
2
n
8sHypergeometricPFQ{1,1,1-2s},{2,2},Log[n]
1
n
n
2
Log[n]
8sHypergeometricPFQ{1,1,1-2s},{2,2},
1
n
n
2
Pi
3
2
n
-6
10
2
π
3
2
n

0
0.
0
0.
Out[]=
In[]:=
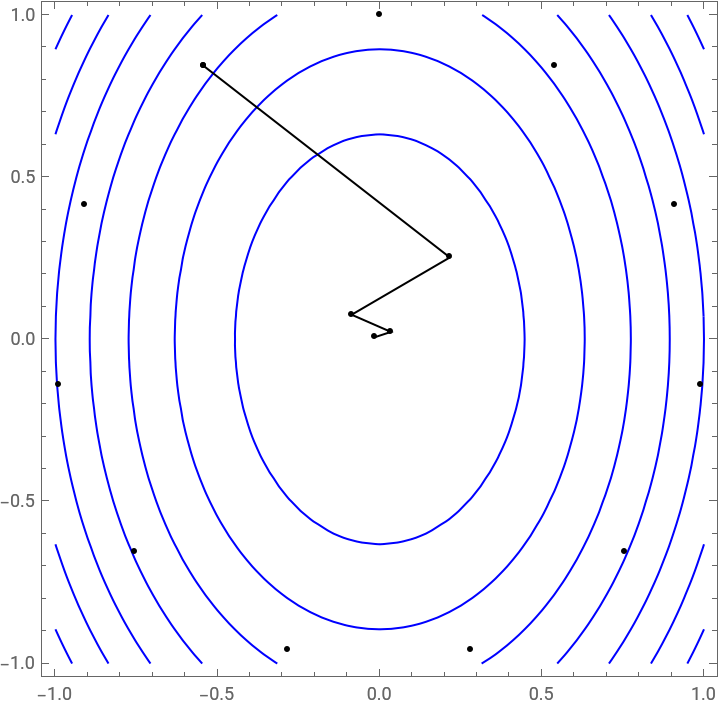
x0s=CirclePoints[11];makeTraj[x0_,numSteps_]:=(n=2;hs=Table[1/i,{i,1,n}];ones=ConstantArray[1,n];xs=NestList[(ones-1.4hs)*#&,x0,numSteps];trajectory=Graphics[Line[xs]];contour=ContourPlot[Total[{x,y}*hs*{x,y}],{x,-1,1},{y,-1,1},ContourShadingNone,ContourStyleBlue];Show[contour,trajectory,Graphics[Point[x0s]],Graphics[Point[xs]]])frames=Flatten[Table[makeTraj[x0,s],{x0,x0s},{s,1,5}]];
In[]:=
anim=ListAnimate[frames,AnimationRate2,AnimationRepetitions∞]
Out[]=
In[]:=
SetDirectory[NotebookDirectory[]];SetDirectory["export"];Export["anim.gif",anim,"AnimationRepetitions"∞]
Out[]=
anim.gif