Proving Turing Machines Compute Successor
Proving Turing Machines Compute Successor
Setup
In[]:=
PacletInstall["https://www.wolframcloud.com/obj/nikm/LeanLink.paclet",ForceVersionInstall->True];PacletInstall["https://www.wolframcloud.com/obj/nikm/TuringMachine.paclet",ForceVersionInstall->True];
In[]:=
Get["LeanLink`"];Get["WolframInstitute`TuringMachine`"];
In[]:=
p="OneSidedTM.";proofDir=FileNameJoin[{NotebookDirectory[],"..","TuringMachine","Proofs"}];leanImport[mod_]:=LeanImport[mod,"ProjectDir"->proofDir,"Filter"->"OneSidedTM"]
A one-sided Turing machine reads a binary-encoded natural number on its tape (LSB at position 0), executes transitions, and halts when the head moves past position 0 to the left. We ask: which TMs compute the successor function? And can we prove it for ALL inputs?
Part 1: Formalizing the Machine
In[]:=
defsEnv=LeanImportString["inductive Dir where | L | R deriving Repr, DecidableEq, BEqstructure Rule where nextState : Nat write : Nat dir : Dir deriving Repr, DecidableEq, BEqstructure TM where numStates : Nat numSymbols : Nat transition : Nat -> Nat -> Rule"]
Out[]=
LeanEnvironment
In[]:=
defsEnv["TM"]["TypeForm"]
Out[]=
Type
Part 2: The Successor Predicate
ComputesSucc
In[]:=
succEnv=LeanImportString["def ComputesSucc (run : Nat -> Nat -> Option Nat) : Prop := forall n : Nat, n >= 1 -> Exists fun fuel => run n fuel = some (n + 1)"]
Out[]=
LeanEnvironment
In[]:=
succEnv["ComputesSucc"]["TypeForm"]
Out[]=
∀ (run : ∀ (a : Nat) (a : Nat), Option Nat), Prop
Part 3: Rule 445 -- The Machine
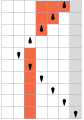
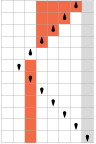
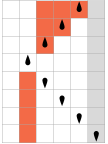
Rule 445 is the canonical (2,2) successor-computing TM.
In[]:=
Grid[{{OneSidedTuringMachinePlot[{445,2,2},1,20,ImageSize->120,"LabelInput"->True],OneSidedTuringMachinePlot[{445,2,2},3,20,ImageSize->120,"LabelInput"->True],OneSidedTuringMachinePlot[{445,2,2},7,20,ImageSize->120,"LabelInput"->True],OneSidedTuringMachinePlot[{445,2,2},15,40,ImageSize->120,"LabelInput"->True]}},Spacings->2]
Out[]=
|
|
|
|


Part 4: The Universal Proof
In[]:=
plusOneEnv=leanImport["OneSidedTM.PlusOne"]
Out[]=
LeanEnvironment
Machine-Checked Spot Checks via native_decide
Machine-Checked Spot Checks via
native_decide
In[]:=
plusOneEnv[p<>"rule445_succ_7"]["TypeForm"]
Out[]=
OneSidedTM.run OneSidedTM.rule445 7 20 = Option.some Nat 8
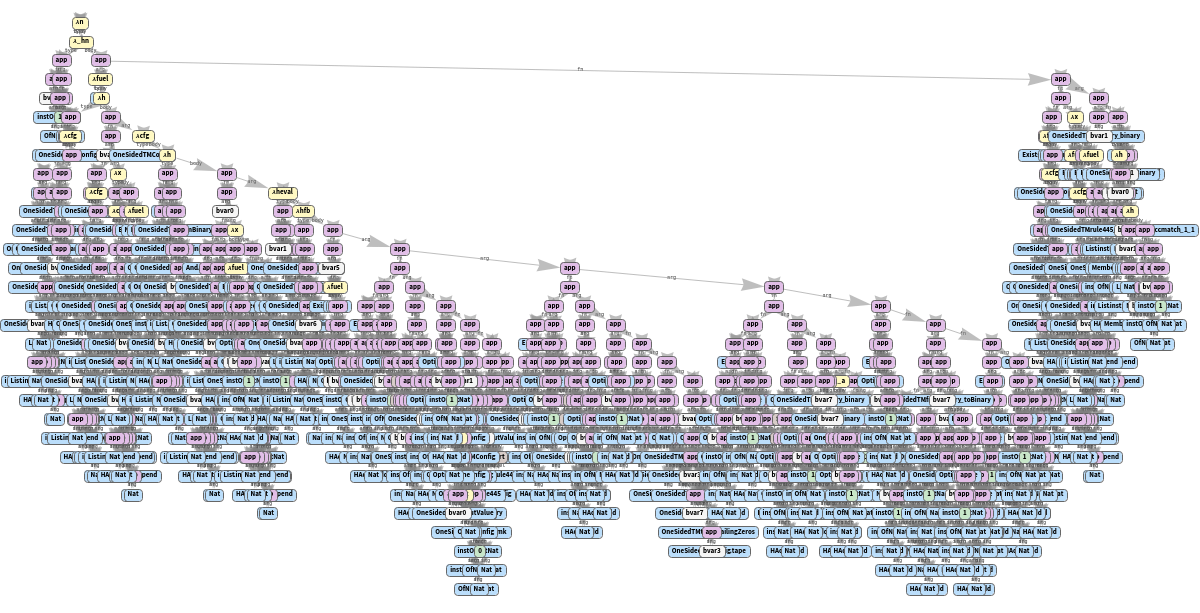
rule445_computesSucc -- Correctness for ALL inputs
rule445_computesSucc
Structural induction on the binary representation. No finite enumeration -- true for every natural number:
In[]:=
plusOneEnv[p<>"rule445_computesSucc"]["TypeForm"]
Out[]=
OneSidedTM.ComputesSucc OneSidedTM.rule445
In[]:=
plusOneEnv[p<>"rule445_computesSucc"]["ExprGraph"]
Out[]=
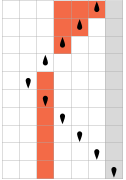
Part 5: All (2,2) Successor Rules by Class
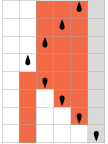
17 rules compute binary successor in the (2,2) space, partitioned into 3 classes:
In[]:=
Grid[{{Labeled[OneSidedTuringMachinePlot[{445,2,2},7,20,ImageSize->180,"LabelInput"->True],Style["Rule 445 (Class A)",Bold,11],Top],Labeled[OneSidedTuringMachinePlot[{453,2,2},7,20,ImageSize->180,"LabelInput"->True],Style["Rule 453 (Class B)",Bold,11],Top],Labeled[OneSidedTuringMachinePlot[{1512,2,2},7,20,ImageSize->180,"LabelInput"->True],Style["Rule 1512 (Class C)",Bold,11],Top]}},Spacings->2]
Out[]=
|
|
|
Class B: Bounce-Back Scanback (8 rules)
Class B: Bounce-Back Scanback (8 rules)
In[]:=
allEnv=leanImport["OneSidedTM.AllPlusOne"]
Out[]=
LeanEnvironment
Class C: Skip + Absorb + Clear-on-Return (8 rules)
Class C: Skip + Absorb + Clear-on-Return (8 rules)
Part 6: 3-State (3,2) Proof Classes
ThreeState: Rule 146514
ThreeState: Rule 146514
Class S: Self-Loop Clear
Class S: Self-Loop Clear
Class SX: Toggle + Drop + Self-Loop Variants
Class SX: Toggle + Drop + Self-Loop Variants
Class SB: Bouncing Clearback
Class SB: Bouncing Clearback
Class D: Delegated Scan (DW + DS)
Class D: Delegated Scan (DW + DS)
Class W: Walk Variants
Class W: Walk Variants
Part 7: The Near-Miss -- Proving Incorrectness
Rule 156830 correctly computes successor for inputs 1 through 6, then fails at n = 7:
Summary: Proof Architecture
(2,2) Classes
(2,2) Classes
(3,2) Classes
(3,2) Classes