Approximating Ackermann Steering Geometry with a Trapezoidal Linkage
Approximating Ackermann Steering Geometry with a Trapezoidal Linkage


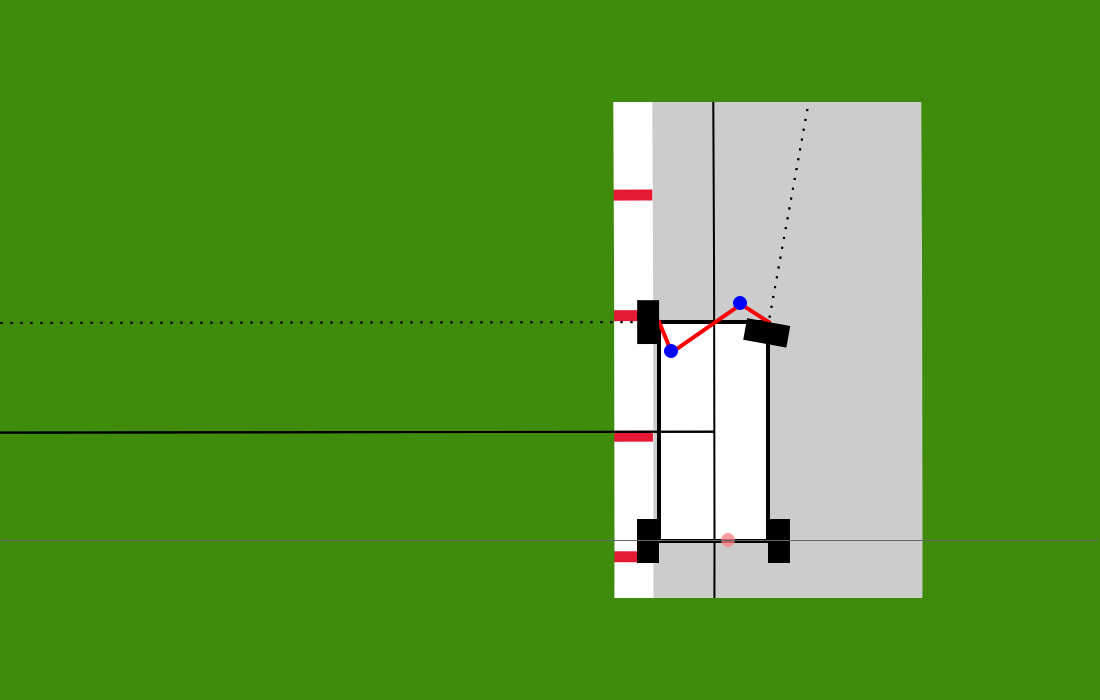
Ackermann geometry is a theoretical model for a steering system that has zero slip. It is achieved when all four wheels of a car are perpendicular to the same turning circle center. This Demonstration uses a common approximation for Ackermann geometry: a simple three-bar linkage. The linkage is arranged in a trapezoid so that the wheel on the inside of a turn will angle more than the outside wheel.
slider | adjusts |
track | widthofcar |
wheelbase | lengthofcar |
rodlength | sizeoftrackrods |
angle | steeringangleofcar |
The slider "toe" angles both the front wheels inward to allow the system to be optimized to Ackermann geometry for any turning radius.
References
References
[1] Wikipedia. "Ackermann Steering Geometry." (Jul 23, 2013) en.wikipedia.org/wiki/Ackermann_steering_geometry.
Permanent Citation
Permanent Citation
David Askins-Gast
"Approximating Ackermann Steering Geometry with a Trapezoidal Linkage"
http://demonstrations.wolfram.com/ApproximatingAckermannSteeringGeometryWithATrapezoidalLinkag/
Wolfram Demonstrations Project
Published: July 24, 2013