Dynamics of a Spring-Pendulum System
Dynamics of a Spring-Pendulum System


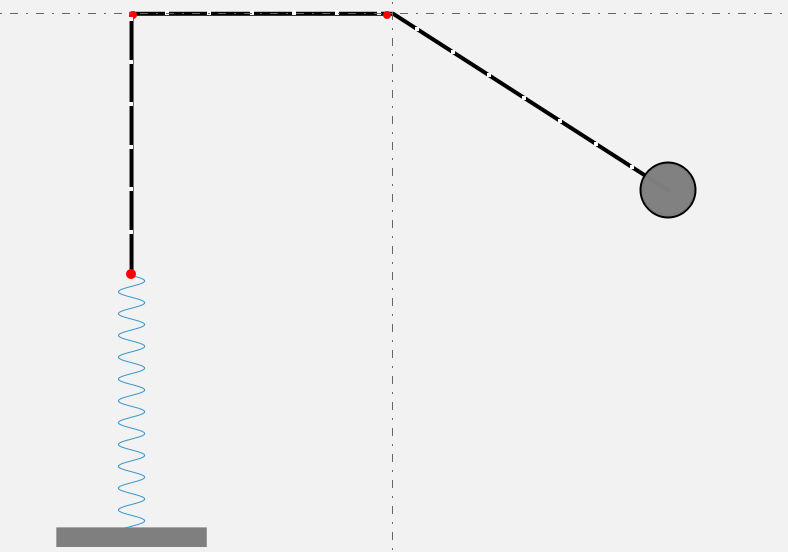
A string of fixed length is free to move over two frictionless rollers fixed at the top. A spring is at one end of the string and a bob is at the other end, forming a pendulum of variable length.
This Demonstration lets you explore the dynamics of this system by changing its parameters or initial conditions.
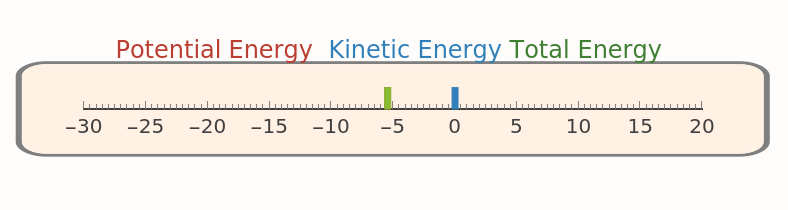
The chart at the top shows the conservation of energy in the system, which is utilized in the Lagrangian method to solve for the equations of motion.
Details
Details
The spring and pendulum system has two degrees of freedom: , the angular displacement of the pendulum bob, and , the vertical displacement of the spring.
θ(t)
y(t)
Lagrangian mechanics can be used to simulate this system.
The potential energy of the system at time is:
t
V=k-gmr(t)cosθ(t)
1
2
2
(y(t)-y(0))
The kinetic energy of the system at time is:
t
T=m(t)+m(t)
1
2
2
ℓ(t)
2
′
θ
1
2
2
′
y
The Lagrangian is given by
V-T
ℒ=2gmcosθ(t)ℓ(t)+m(t)-k+m(t)
1
2
2
′
θ
2
ℓ(t)
2
(y(0)-y(t))
2
′
y
The algebraic constraint expresses the constant length of the string:
L
d-y(t)+ℓ(t)=L
The resulting equations of motion are
m(L-d)(t)+gmcosθ(t)+y(t)m(t)-k+ky(0)-m(t)0
2
′
θ
2
′
θ
′′
y
′′
θ
′
θ
′
y
External Links
External Links
Permanent Citation
Permanent Citation
Erik Mahieu
"Dynamics of a Spring-Pendulum System"
http://demonstrations.wolfram.com/DynamicsOfASpringPendulumSystem/
Wolfram Demonstrations Project
Published: October 7, 2014