Chebyshev's Lambda Mechanism
Chebyshev's Lambda Mechanism

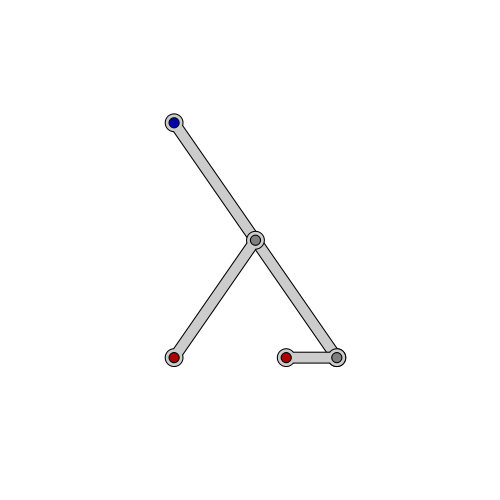
Pafnuty Lvovich Chebyshev invented this kinematic linkage, which converts rotational motion to approximate straight-line motion. The name "lambda mechanism" comes from its resemblance to the Greek letter lambda ().
λ
Details
Details
The mechanism consists of two fixed joints (the distance between them is equal to ), a small driving link (with length ), and three big slave links of equal length (equal to 100). When the gray joint of the small link rotates, the blue joint moves along a curve (click the "trace" checkbox to see it). The bottom of this curve (marked bold) is close to being a straight line. The blue joint moves along the bottom of this curve for half of the rotation and the top for the other half.
100(5-
7
)3100(3-
7
)Chebyshev saw the resemblance of the blue joint trajectory to the trajectory of a horse's hoof. He attached legs to four such lambda mechanisms to get the first walking mechanism, which he called the plantigrade machine. To see a 3D model, go to Mechanisms by Tchebyshev.
External Links
External Links
Permanent Citation
Permanent Citation
Nikita Panyunin, Nikolai Andreev
"Chebyshev's Lambda Mechanism"
http://demonstrations.wolfram.com/ChebyshevsLambdaMechanism/
Wolfram Demonstrations Project
Published: January 1, 1999